Distortion Correction Theory¶
Basic Types of Distortion¶
There are two basic distortions that happens in VR.
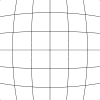
|
Barrel distortion |
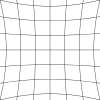
|
Pincushion distortion |
Basic Formula for Software Correction¶
For a normal image, you can change the position of each point by using the formula:




Currently, the offset of K must be set to 0 for the SDK algorithm. For the rest of the coefficients K0 to K6, refer to the Brown distortion model and further fine-tune per actual result. The value of K depends on the effect you want to achieve. For example, a negative K value will produce a barrel distortion, while a positive K value will produce a pincushion distortion.
Distortion Correction in VR¶
VR headsets produce a pincushion distortion when looking through the lens. To correct a pincushion distorted image, apply a barrel distortion to make the image look normal. Finding the correct value of K is the most important thing when correcting distortion in VR.
See further information for reference:Wikipedia - Distorion (optics)