Change Controller Pose Simulation¶
This feature is only supported in the WaveVR SDK version 2.1.9 or later.
Introduction¶
For rotation-only controllers (3DoF), the position is fixed zero.
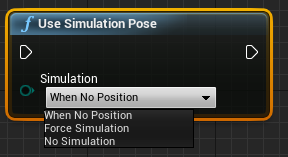
WaveVR provides simulation options for developers to simulate pose.
Runtime¶
If a developer needs to change simulation dynamically in runtime, he or she will need to modify the C++ source code or Blueprints.
C++¶
In source code, add code:
#include "Classes/WaveVRInputFunctionLibrary.h"
void SomeClass::SomeFunction()
{
UWaveVRInputFunctionLibrary::UseSimulationPose( <enum of SimulatePosition> );
}