Wave Hand Tracking Interface¶
Refer to Wave XR Plugin Packages about VIVE Wave™ XR plugin packages.
The Essence package provides the Wave.Essence.Hand.HandManager interface to access the Hand Tracking data.
Hand Manager¶
Before using the Hand Tracking API, add the HandManager component from the menu item Wave > GameObject > Add Hand Manager.
To use Hand Tracking API, check if the Hand Manager existed by using the following code.
using Wave.Essence.Hand;
if (HandManager.Instance != null)
Hand Manager Class Reference¶
Namespace Wave.Native from Wave Native package is used by Hand Manager.
Hand Manager Public Types¶
HandType¶
enum HandType {
Right = 0,
Left = 1
}
HandJoint¶
enum HandJoint {
Palm = WVR_HandJoint.WVR_HandJoint_Palm,
Wrist = WVR_HandJoint.WVR_HandJoint_Wrist,
Thumb_Joint0 = WVR_HandJoint.WVR_HandJoint_Thumb_Joint0,
Thumb_Joint1 = WVR_HandJoint.WVR_HandJoint_Thumb_Joint1,
Thumb_Joint2 = WVR_HandJoint.WVR_HandJoint_Thumb_Joint2,
Thumb_Tip = WVR_HandJoint.WVR_HandJoint_Thumb_Tip,
Index_Joint0 = WVR_HandJoint.WVR_HandJoint_Index_Joint0,
Index_Joint1 = WVR_HandJoint.WVR_HandJoint_Index_Joint1,
Index_Joint2 = WVR_HandJoint.WVR_HandJoint_Index_Joint2,
Index_Joint3 = WVR_HandJoint.WVR_HandJoint_Index_Joint3,
Index_Tip = WVR_HandJoint.WVR_HandJoint_Index_Tip,
Middle_Joint0 = WVR_HandJoint.WVR_HandJoint_Middle_Joint0,
Middle_Joint1 = WVR_HandJoint.WVR_HandJoint_Middle_Joint1,
Middle_Joint2 = WVR_HandJoint.WVR_HandJoint_Middle_Joint2,
Middle_Joint3 = WVR_HandJoint.WVR_HandJoint_Middle_Joint3,
Middle_Tip = WVR_HandJoint.WVR_HandJoint_Middle_Tip,
Ring_Joint0 = WVR_HandJoint.WVR_HandJoint_Ring_Joint0,
Ring_Joint1 = WVR_HandJoint.WVR_HandJoint_Ring_Joint1,
Ring_Joint2 = WVR_HandJoint.WVR_HandJoint_Ring_Joint2,
Ring_Joint3 = WVR_HandJoint.WVR_HandJoint_Ring_Joint3,
Ring_Tip = WVR_HandJoint.WVR_HandJoint_Ring_Tip,
Pinky_Joint0 = WVR_HandJoint.WVR_HandJoint_Pinky_Joint0,
Pinky_Joint1 = WVR_HandJoint.WVR_HandJoint_Pinky_Joint1,
Pinky_Joint2 = WVR_HandJoint.WVR_HandJoint_Pinky_Joint2,
Pinky_Joint3 = WVR_HandJoint.WVR_HandJoint_Pinky_Joint3,
Pinky_Tip = WVR_HandJoint.WVR_HandJoint_Pinky_Tip,
}
HandMotion¶
enum HandMotion {
None = WVR_HandPoseType.WVR_HandPoseType_Invalid,
Pinch = WVR_HandPoseType.WVR_HandPoseType_Pinch,
}
HandHoldRole¶
enum HandHoldRole {
None = WVR_HandHoldRoleType.WVR_HandHoldRoleType_None,
Main = WVR_HandHoldRoleType.WVR_HandHoldRoleType_MainHold,
Side = WVR_HandHoldRoleType.WVR_HandHoldRoleType_SideHold,
}
HandHoldType¶
enum HandHoldType {
None = WVR_HandHoldObjectType.WVR_HandHoldObjectType_None,
Gun = WVR_HandHoldObjectType.WVR_HandHoldObjectType_Gun,
OCSpray = WVR_HandHoldObjectType.WVR_HandHoldObjectType_OCSpray,
LongGun = WVR_HandHoldObjectType.WVR_HandHoldObjectType_LongGun,
Baton = WVR_HandHoldObjectType.WVR_HandHoldObjectType_Baton,
FlashLight = WVR_HandHoldObjectType.WVR_HandHoldObjectType_FlashLight,
}
TrackerStatus¶
enum TrackerStatus {
// Initial, can call Start API in this state.
NotStart,
StartFailure,
// Processing, should NOT call API in this state.
Starting,
Stopping,
// Running, can call Stop API in this state.
Available,
// Do nothing.
NoSupport
}
TrackerType¶
enum TrackerType {
Natural = WVR_HandTrackerType.WVR_HandTrackerType_Natural,
Electronic = WVR_HandTrackerType.WVR_HandTrackerType_Electronic,
}
Hand Manager Private Data Fields¶
uint m_NaturalHandJointCount
WVR_HandTrackingData_t m_NaturalHandTrackerData
WVR_HandJointData_t m_NaturalHandJointDataLeft, m_NaturalHandJointDataRight
WVR_Pose_t[] s_NaturalHandJointsPoseLeft, s_NaturalHandJointsPoseRight
Hand Manager Public Memeber Functions¶
StartHandTracker¶
Starts Hand Tracking with specific tracker. We support natural hand tracking only.
void StartHandTracker(TrackerType tracker)
StopHandTracker¶
Stops Hand Tracking with specific tracker. We support natural hand tracking only.
void StopHandTracker(TrackerType tracker)
GetHandConfidence¶
Retrieves the confidence value (0~1) where 1 means the most accurate of Hand Tracking.
float GetHandConfidence(bool isLeft)
GetJointPosition¶
Retrieves the joint position in Vector3.
bool GetJointPosition(HandJoint joint, ref Vector3 position, bool isLeft)
GetJointRotation¶
Retrieves the joint rotation in Quaternion.
bool GetJointRotation(HandJoint joint, ref Quaternion rotation, bool isLeft)
GetPinchOrigin¶
Retrieves the left/right hand pinch origin in Vector3.
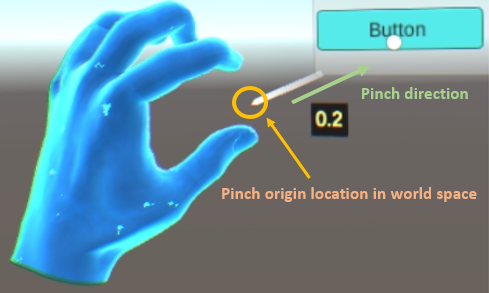
bool GetPinchOrigin(ref Vector3 origin, bool isLeft)
GetPinchDirection¶
Retrieves the left/right hand pinch direction in Vector3.
bool GetPinchDirection(ref Vector3 direction, bool isLeft)
GetPinchStrength¶
Retrieves the left/right hand pinch motion strength (0~1) where 1 means the thumb tip and index tip is touching.
float GetPinchStrength(bool isLeft)
GetPinchThreshold¶
Retrieves the system default threshold always used to judge if a “selection” happens when the pinch strength value is greater than the threshold.
float GetPinchThreshold(TrackerType tracker)
GetPinchOffThreshold¶
Retrieves the system default threshold always used to judge if a “release” happens when a hand is pinching and the pinch strength value is less than the threshold.
Note that the Pinch Off Threshold should NOT be greater than the Pinch Threshold.
float GetPinchOffThreshold(TrackerType tracker)
IsHandPinching¶
Checks if a hand is pinching currently.
bool IsHandPinching(TrackerType tracker, bool isLeft)
GetGraspStrength¶
Retrieves the left/right hand’s grasp strength.
float GetGraspStrength(TrackerType tracker, bool isLeft)
IsHandGrasping¶
Retrieves the left/right hand’s grasp status.
bool IsHandGrasping(TrackerType tracker, bool isLeft)
FuseWristPositionWithTracker¶
To enhance the stability of wrist position tracking by fusing the position with a tracker.
void FuseWristPositionWithTracker(bool fuse)
IsWristPositionFused¶
Checks if the stability of wrist position is enhanced by fusing the position with a tracker.
bool IsWristPositionFused()
Wave Native Types¶
WVR_HandTrackingData_t¶
struct WVR_HandTrackingData_t {
long timestamp;
WVR_HandJointData_t right; /**< The hand tracker data of right hand, refer to @ref WVR_HandJointData_t. */
WVR_HandJointData_t left; /**< The hand tracker data of left hand, refer to @ref WVR_HandJointData_t. */
}
WVR_HandJointData_t¶
struct WVR_HandJointData_t {
bool isValidPose; /**< The label of valid(true)/invalid(false) pose. */
float confidence; /**< The hand confidence value. */
uint jointCount; /**< Specify the size of the @ref WVR_Pose_t array. */
IntPtr joints; /**< The array of the @ref WVR_Pose_t. */
WVR_Vector3f_t scale; /**< defualt is 1. */
WVR_Vector3f_t wristLinearVelocity;
WVR_Vector3f_t wristAngularVelocity;
}
WVR_Vector3f_t¶
struct WVR_Vector3f_t {
float v0;
float v1;
float v2;
}
WVR_Quatf_t¶
struct WVR_Quatf_t {
float w;
float x;
float y;
float z;
}