Controller Orientation¶
Introduction¶
Controllers come in different forms and often have different tracking origins. Therefore, developers have to manually adjust the translation and rotation of different 3D models that will be attached to the Tracked Pose Driver, which is repetitive and time-consuming task when a developer wants to support multiple VIVE Wave™ devices.
Controller Orientation addresses this problem by offering different pose modes that will apply the necessary translational and rotational offsets that are specific to each controller. This way, developers simply need to match the transform of their 3D models to the tracking origin once, and then let Controller Orientation handle the differences in tracking origins between different types of controllers.
Pose Modes¶
Controller Orientation offers three different pose modes:
- Panel oriented mode: The tracking origin is on the controller panel. Use this mode when you expect the user to carry out actions that will mainly involve the controller panel, e.g. pressing buttons to interact with UI elements.
- Trigger oriented mode: The tracking origin is right behind the trigger of the controller. Use this mode when you expect the user to carry out actions that will mainly involve the trigger of the controller (e.g. shooting a gun in a game).
- Handle oriented mode: The tracking origin is located on the axial of the handle and near the controller panel. Use this mode when you expect the user to carry out actions that will mainly involve the handle of the controller (e.g. holding and swinging a sword/wand).
How to use¶
Contents |
Blueprint Callable Functions¶
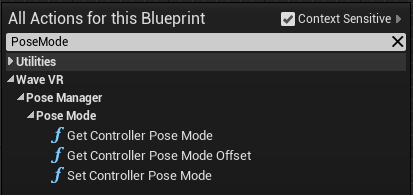
- Get Controller Pose Mode: Get the current pose mode for the left/right controller.
- Get Controller Pose Mode Offset: Get the tracking origin offset of the current pose mode.
- Set Controller Pose Mode: Set the pose mode for the left/right controller.
Placement of 3D Models¶
Note
The red, green and blue pillars in the sample figures indicate the positive direction of the x axis, y axis and z axis respectively.
The intersection of these three pillars is the origin of the Actor (i.e. the tracking origin when controller pose is directly applied to the Actor).
Here are some examples on how to match the transform of 3D models to different pose modes:
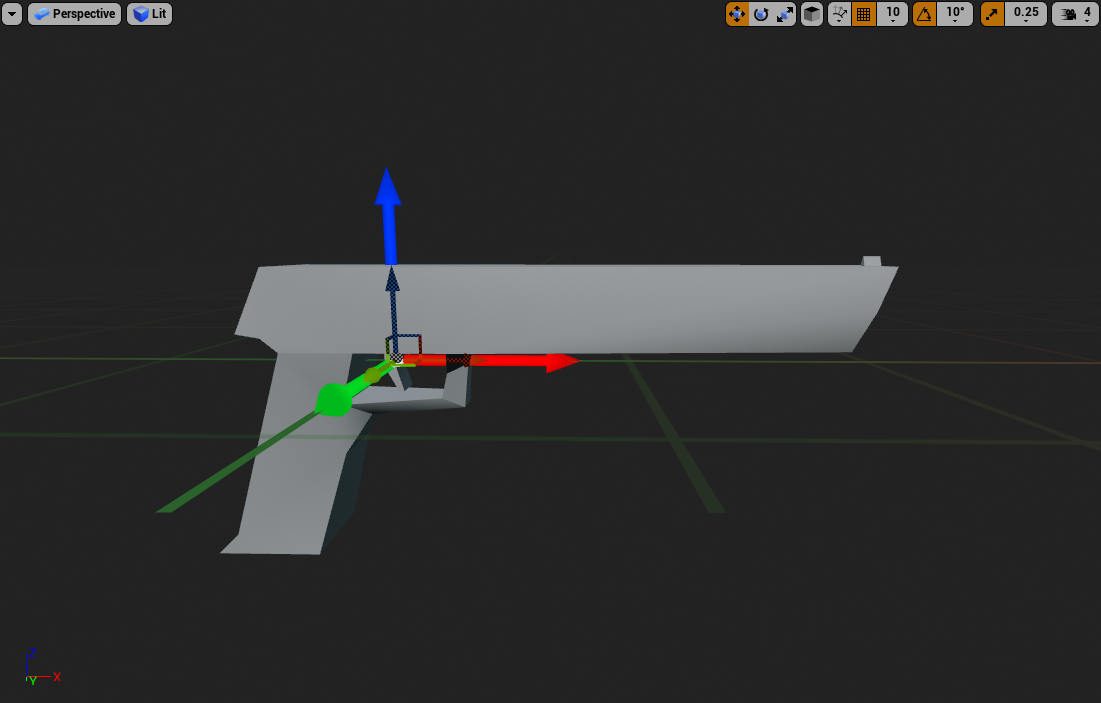
Matching the transform of a pistol to the tracking origin of Trigger oriented mode.
The trigger is right in front of the tracking origin.
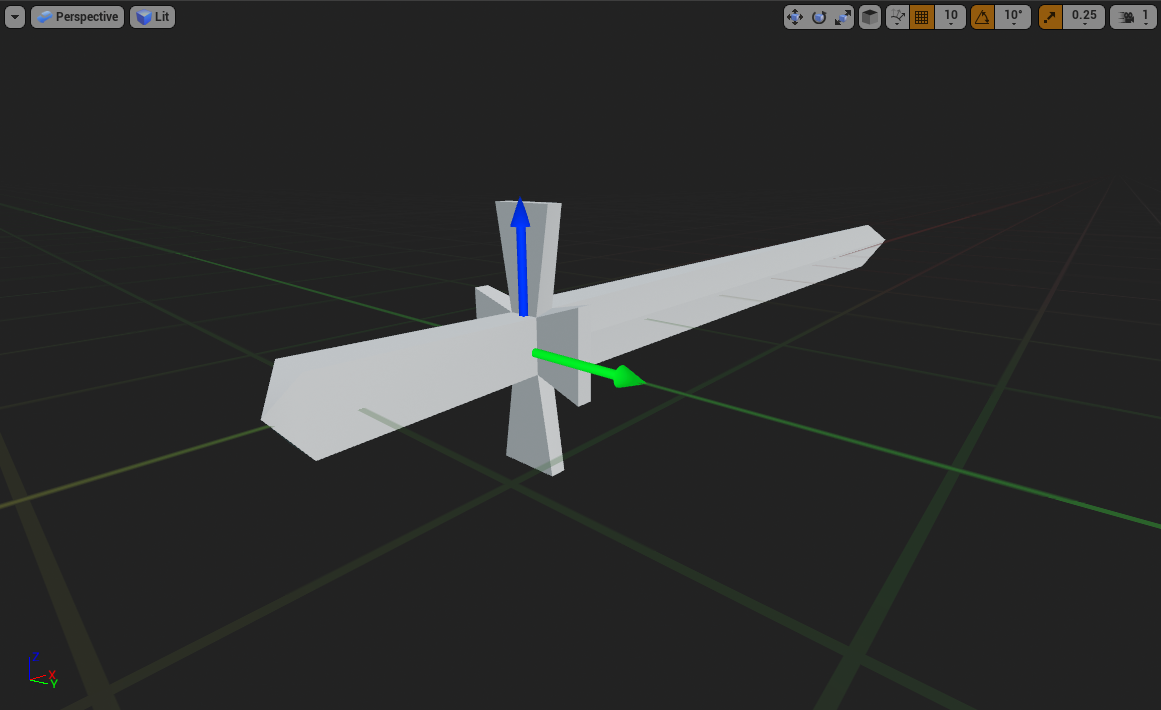
Matching the transform of a sword to the tracking origin of Handle oriented mode.
The sword guard is right in front of the tracking origin.